Link to the English version: Long-term effects for designing piers monolithically connected to a prestressed girder or slab
In diesem Blogbeitrag geht es um ein technisch anspruchsvolles Thema: die Berücksichtigung von Langzeiteinflüssen (Schwinden und Kriechen) bei der Bemessung von Pfeilern, die monolithisch mit einem vorgespannten Träger oder einer Platte verbunden sind. Dieses strukturelle System findet man in monolithischen Bauwerken oder in Spannbetonbrücken. Wenn Sie sich für Tragwerksplanung begeistern und vielleicht sogar schon in Ihrer beruflichen Praxis damit zu tun hatten wird dieses Thema für Sie von grossem Interesse sein.
Der Entwurf von monolithischen, d.h. fugenlosen Bauwerken setzt sich beim Brückenbau in Europa immer mehr durch. Die Hauptgründe dafür sind zum einen der Wunsch, Probleme der Dauerhaftigkeit zu minimieren und die Instandhaltungskosten zu senken, und zum anderen, dass zunehmend Richtlinien für den Entwurf solcher Bauwerke zur Verfügung stehen. Die Schweiz ist ein Referenzland, das zur Entwicklung dieser Art von Bauwerken beigetragen hat. Traditionell werden Betonbrücken mit monolithisch mit der Fahrbahn verbundenen Pfeilern und halbintegrale oder integrale Brücken (monolithische Verbindung an beiden Widerlagern) [1], wo immer möglich, bevorzugt [2]. In der Schweiz wurden zahlreiche fugenlose Brücken [3][4][5][6][7] gebaut, und technische Richtlinien fördern integrale oder semi-integrale Brücken [1][2] (alte Referenz1Routes Nationales Suisses, Projects Standards de Ponts, Passage Supérieur avec Béquilles en V en Béton Coule sur Place, Departement Federak de L’Interieur, Bern 1972 aus den 70er Jahren). Angesichts der daraus resultierenden Tendenz, immer längere monolithische, fugenlose Brücken zu bauen, sind immer genauere und komplexere Berechnungen erforderlich, um die Pfeiler zuverlässig zu bemessen. Vor etwa zehn Jahren hatte ich die Gelegenheit, an einer Veröffentlichung mitzuwirken, die Ingenieure bei der Bemessung von Pfeilern langer fugenloser Betonbauwerke unterstützt [8]. Dieses Dokument ist allerdings auf Bauwerke beschränkt, bei denen die Platte oder der Träger nicht vorgespannt ist.
Trotz der Verfügbarkeit leistungsfähiger Statiksoftware bleibt die Analyse statisch unbestimmter Strukturen, die Langzeiteinflüssen ausgesetzt sind, eine Herausforderung. Ein anschauliches Beispiel dafür, das wir in diesem Blog erörtern werden, ist die Abschätzung der Biegemomente aufgrund von Langzeiteinflüssen in einem Betonpfeiler, der monolithisch mit einem vorgespannten Träger verbunden ist. Bei dieser Art von Bauwerk ist ein grosser Teil der Kräfte, die im Pfeiler wirken, auf die Verformungen zurückzuführen, die dem Pfeilerkopf durch das Deck aufgezwungen werden und die in den Grenzzuständen der Gebrauchstauglichkeit (GZG) und der Tragsicherheit (GZT Typ 2 und GZT Typ 42Obwohl die aufgezwungenen Verformungen (Schwinden und Kriechen) keine zyklischen Einwirkungen sind, sind sie im GZT Typ 4 (Ermüdungsversagen) für Betonermüdungsnachweise relevant, die von den absoluten maximalen und minimalen Betonspannungen abhängen.) relevant sind. Die Ermittlung der durch Langzeiteinflüsse verursachten Schnittgrössen im Pfeiler mit akzeptabler Genauigkeit ist jedoch kompliziert, da die Spannungen über der Zeit nichtlinear variieren (der Elastizitätsmodul variiert mit dem Alter des Betons), der Träger und der Pfeiler nicht gleichmässig kriechen (unterschiedliche Kriechkoeffizienten, d. h. unterschiedliche Betone und unterschiedliches Alter) und die gerissene Biegesteifigkeit über die Pfeilerhöhe variiert und von der Belastungsgeschichte abhängt (maximale Zugspannung). Um die Schnittgrössen in den Pfeilern einfach abschätzen zu können, berücksichtigen die Ingenieure in der üblichen Ingenieurpraxis daher in der Regel (i) reduzierte Pfeilerbiegesteifigkeiten aufgrund von Rissen (im Allgemeinen konstant oder linear variabel entlang der Pfeiler), die durch Iteration berechnet werden und für GZG-, GZT Typ 2- und GZT Typ 4-Nachweise unterschiedlich sind, (ii) etwa 40…50% des gesamten Schwindens der Fahrbahnplatte zur Zeit t = ∞, um die Langzeiteinflüsse zu berücksichtigen, aber (iii) vernachlässigen Langzeiteinflüsse aufgrund der Vorspannung mit der Begründung, dass das Kriechen des Pfeilers die Zunahme der Pfeilerkopfverschiebung aufgrund des Kriechens des Trägers kompensiert.
Die erste Vereinfachung kann im Allgemeinen akzeptiert werden, wenn sie mit dem nötigen technischen Sachverstand durchgeführt wird, sollte aber durch eine Sensitivitätsstudie ergänzt werden, um die Unsicherheiten der Berechnungen abzudecken. In Bezug auf die zweite und dritte Vereinfachung stellen sich jedoch unweigerlich folgende Fragen: Ist dieser Ansatz angemessen und unter welchen Bedingungen ist er gültig? Was ist der Hintergrund? Ist dieser Ansatz konservativ? Ist es notwendig, eine Sensitivitätsanalyse durchzuführen, um Unsicherheiten abzudecken, wenn diese Massnahme für den Entwurf entscheidend ist?
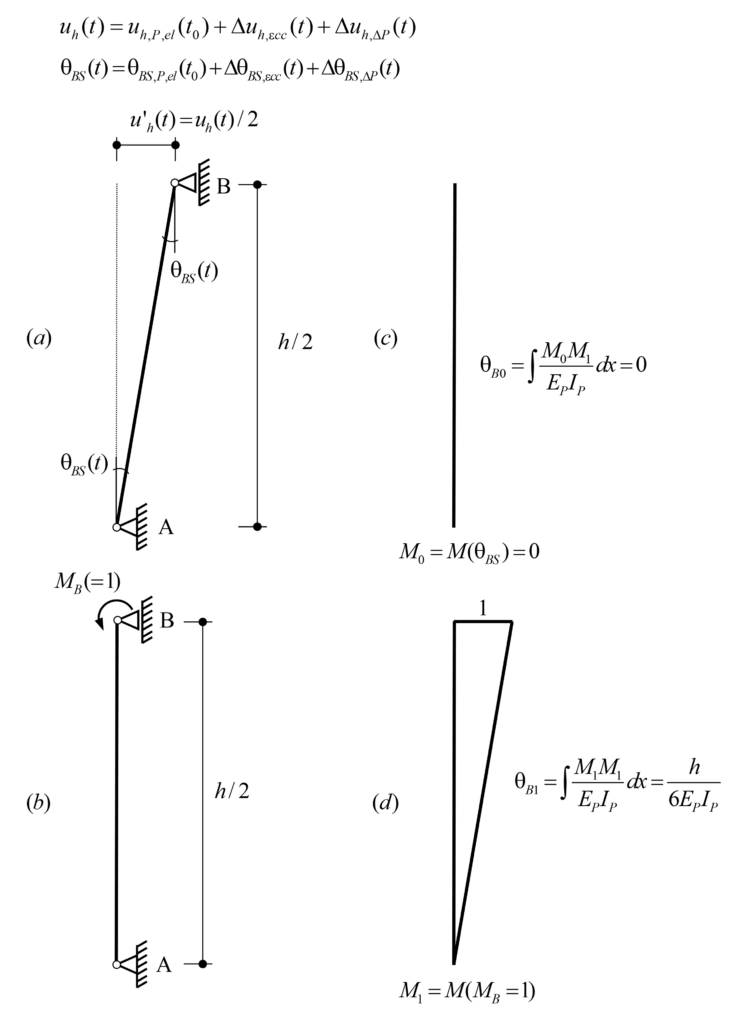
Nach dieser Einführung ist es nun an der Zeit, diese Fragen zu beantworten. Im Folgenden werden Sie und ich das formulierte Problem analytisch lösen, die Ergebnisse interpretieren und einige Schlussfolgerungen ziehen. Das zu untersuchende Bauwerk ist in Abbildung 1 vereinfacht dargestellt. Das horizontale Element stellt einen Spannbetonträger dar, das vertikale Element einen Pfeiler mit der Höhe h, der monolithisch mit dem Träger in einem Abstand LT (Ausdehnungslänge) vom Fixpunkt verbunden ist. Die mechanischen Eigenschaften sind für beide Elemente konstant und sind in Abbildung 1(a) dargestellt. Abbildung 1(b) und Abbildung 1(c) zeigen die horizontalen Verschiebungen des Pfeilerkopfes über die Zeit, uh,εcs(t) und uh,P,el(t), verursacht durch das Schwinden ecs(t) bzw. die Vorspannung P(t) des Trägers. Beachten Sie, dass die Einspannung des Pfeilers in die horizontalen Verschiebungen des Trägers vernachlässigt wird, da die axiale Steifigkeit des Trägers im Allgemeinen um Grössenordnungen höher ist als die horizontale (Biege-)Steifigkeit des Pfeilers. Darüber hinaus wurden für die in Abbildung 1(c) dargestellten Gleichungen folgende Annahmen getroffen: Normalkraft konstant entlang des Trägers (keine Vorspannungkraftverluste durch Reibung) und EPIP<<EGIG, d.h. Pfeiler “perfekt” doppelt eingespannt. Es ist zu beachten, dass die letztgenannte Überlegung für einige Fälle nicht geeignet ist, z. B. für Bauwerke, bei denen die Biegesteifigkeit der Stütze im Vergleich zu der des Trägers nicht vernachlässigbar ist, oder für flexible Fundamente (Tiefgründungen). Die im Folgenden berechneten Langzeiteinflüsse werden jedoch unabhängig von den Steifigkeiten der Pfeiler und der Fahrbahnplatte formuliert, die direkt als aufgezwungene Verformungen in die Finite-Elemente-Analyse (FEA) einbezogen werden können. Darüber hinaus wird der Einfluss des Kriechens des Pfeilers auf die entsprechenden (ungerissenen und gerissenen) Biegesteifigkeiten in den folgenden Berechnungen nicht berücksichtigt, so dass die äquivalente reduzierte Biegesteifigkeit des Pfeilers unter Berücksichtigung von Kriechen und Rissbildung im statischen System verwendet werden sollte.
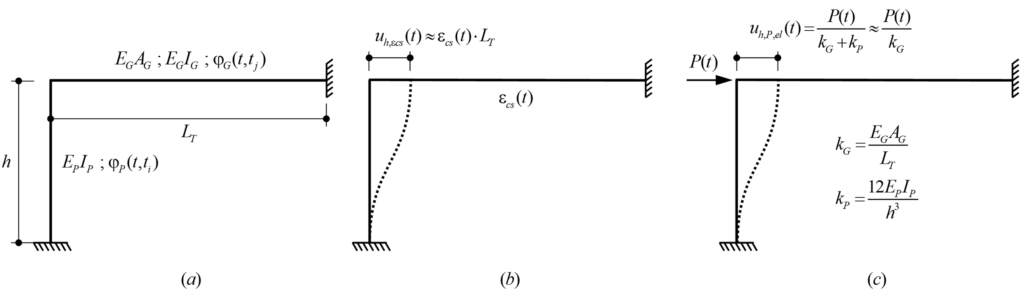
EG: Elastizitätsmodul des Trägers
EP: Elastizitätsmodul des Pfeilers
IG: Flächenträgheitsmoment des Trägers
IP: Flächenträgheitsmoment des Pfeilers
φG(t,tj): Kriechkoeffizient des Trägers
φP(t,ti): Kriechkoeffizient des Pfeilers
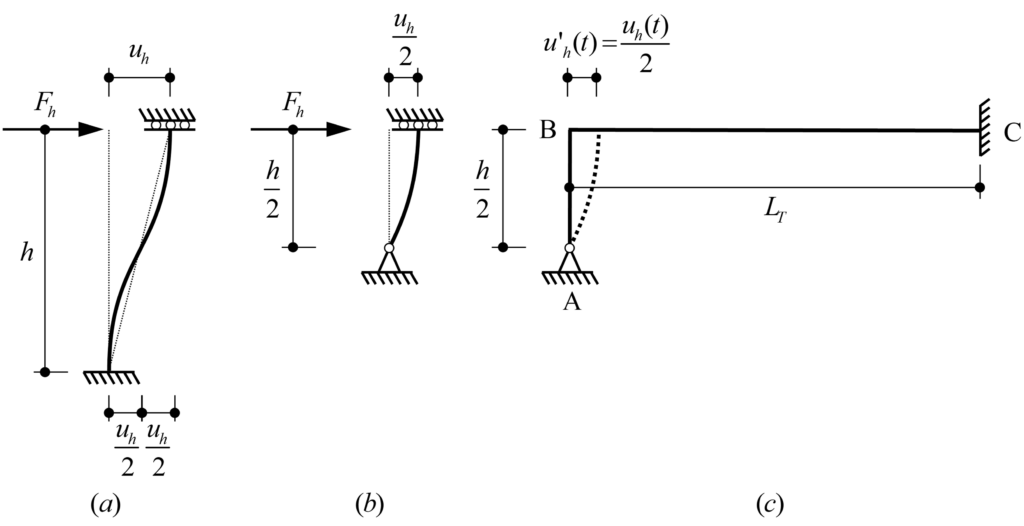
Um das System analytisch zu lösen, wird die Rahmenstruktur aus Abbildung 1 gemäss Abbildung 2 vereinfacht. Um die Schnittgrössen im Pfeiler infolge der aufgezwungenen horizontalen Verschiebung uh, zu erhalten, kann der isolierte doppelt-eingespannte Pfeiler der Höhe h (Abbildung 2 (a)) durch den isolierten gelenkig eingespannten Pfeiler der Höhe h/2 (Abbildung 2 (b)) ersetzt werden. Abbildung 2(c) zeigt somit das äquivalente vereinfachte System zur Ermittlung der Schnittgrössen im Pfeiler infolge einer horizontalen Verschiebung u’h am Pfeilerkopf, die gleich der Hälfte der horizontalen Verschiebung uh im ursprünglichen System (Abbildung 1) ist, d. h. u’h (t)= uh(t)/2. Um die korrekte Verschiebung des Pfeilerkopfes infolge der Vorspannung zu erhalten, ist die äquivalente Vorspannkraft P’ (t) im vereinfachten System (Abbildung 2(c)) gleich der Hälfte der Vorspannkraft P(t)/2 im ursprünglichen System (Abbildung 1), wenn die Biegesteifigkeit des Pfeilers gegenüber der axialen Steifigkeit des Trägers vernachlässigt wird, andernfalls wird sie wie folgt bestimmt:

Im Folgenden isolieren wir den Pfeiler des in Abbildung 2(c) dargestellten vereinfachten Systems und lösen ein System, das aus einem Pfeiler mit einem einzigen Grad statischer Unbestimmtheit besteht, indem wir die zeitabhängige Kraftmethode anwenden und die Kompatibilitätsgleichungen über die Zeit formulieren, wobei:
BS (Basissystem): Feste Rotation in B (Pfeilerkopf) freigegeben
ÜG (Überzählige Grösse): Biegemoment in B (Pfeilerkopf)
Zusätzlich werden die zeitabhängigen Biegemomente am Pfeilerkopf infolge Schwinden und Vorspannung separat berechnet.
Zeitabhängiges Verhalten von Betonpfeilern
1. Schwinden (zeitabhängige Pfeilerkopfverschiebung3Beachten Sie, dass die Pfeilerkopfverschiebungen analog zu den Setzungen in unserer Vorlesung über Langzeiteinflüsse behandelt werden können (zeitunabhängig oder zeitabhängig).)
Abbildung 3 zeigt den isolierten Pfeiler mit dem Basissystem (BS) und der überzähligen Grösse (ÜG), die zur Bestimmung des Biegemoments MB(t) mit Hilfe der Kraftmethode verwendet wird. Da sich das Biegemoment MB(t) über die Zeit verändert, wird die Kompatibilität am Auflager B sowohl zum Anfangszeitpunkt als auch zeitabhängig ausgedrückt.
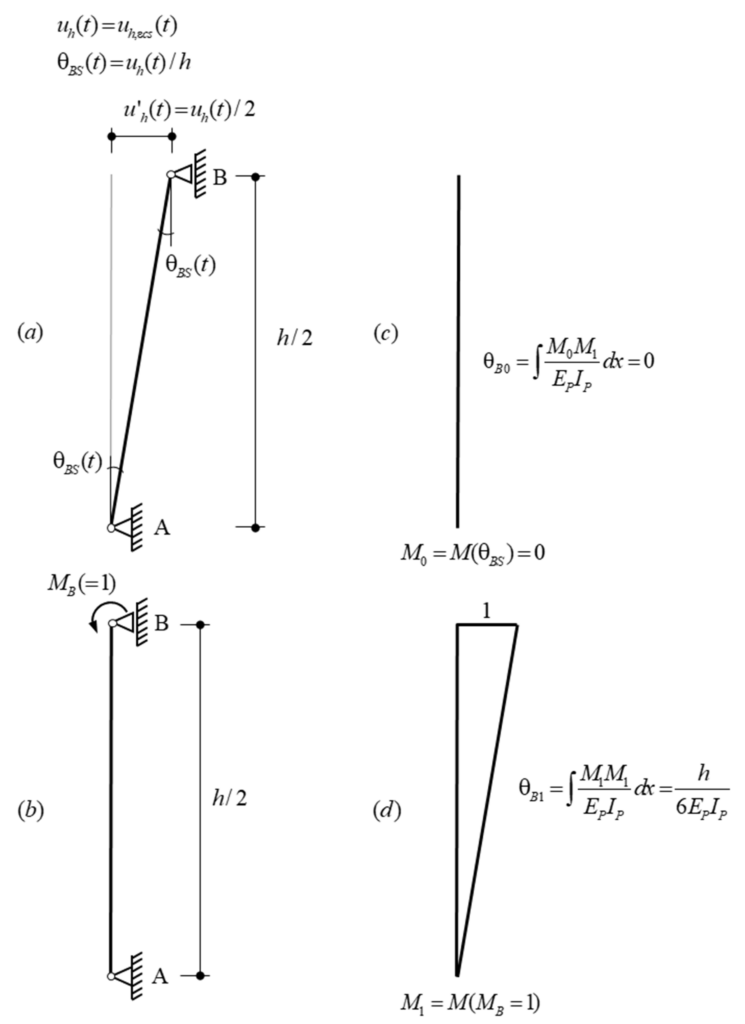
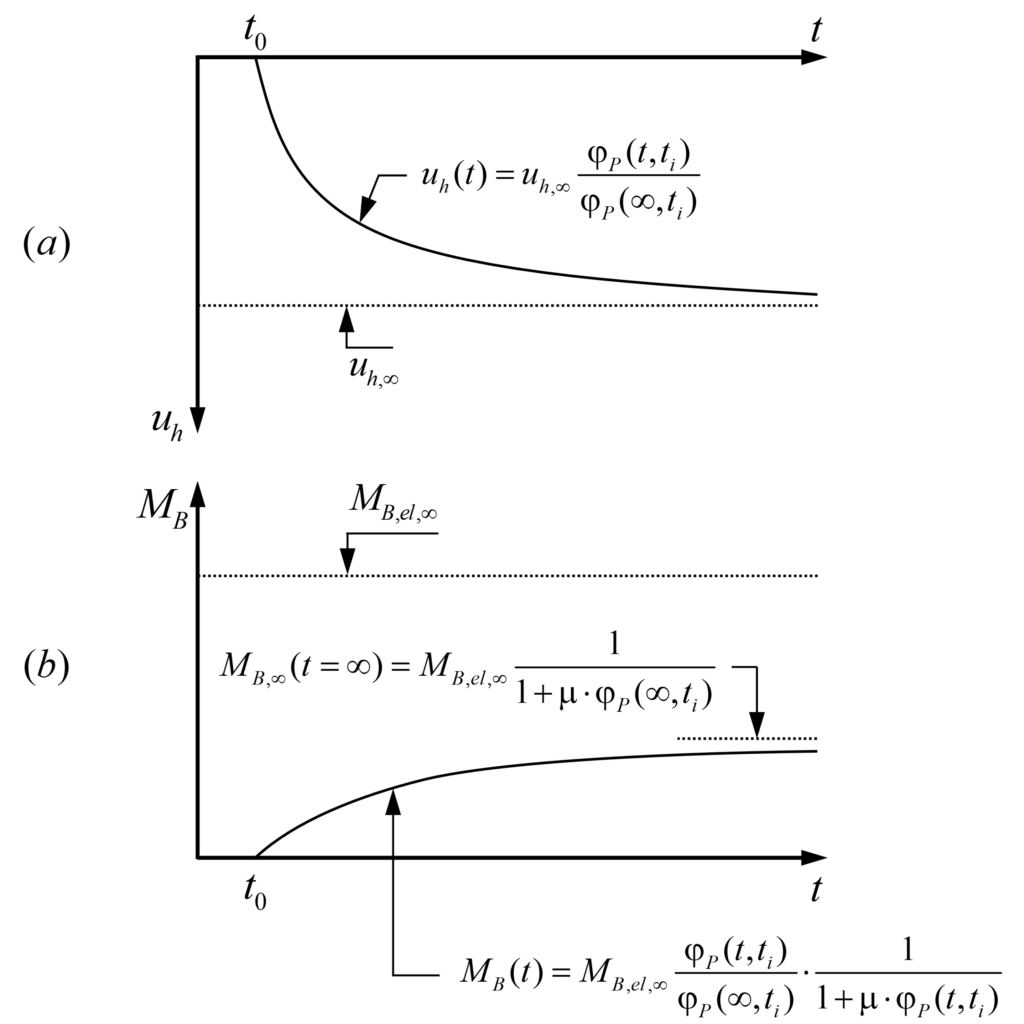
Das Schwinden εcs(t) des Trägers verursacht eine Verformung über die Zeit, die horizontale Verschiebungen uh(t) und Biegemomente MB(t) am Pfeilerkopf erzeugt. Zum Anfangszeitpunkt sind sowohl die horizontale Verschiebung uh(t0) als auch das Biegemoment MB(t0) Null (kein Schwinden). Zu jedem beliebigen Zeitpunkt t > t0, ist der Träger um εcs(t) geschwunden, was zu einer horizontalen Verschiebung uh(t) und einem Biegemoment MB(t) führt, siehe Abbildung 4(a) bzw. Abbildung 4(b). Unter der Annahme, dass das Schwinden des Trägers und damit die aufgezwungenen Verformungen über die Zeit uh(t) proportional zur Kriechfunktion des Pfeilers sind, kann uh(t) wie folgt ausgedrückt werden:
![\[{{u}_{h}}(t)={{u}_{h,\infty }}\frac{{{\varphi }_{P}}(t,{{t}_{i}})}{{{\varphi }_{P}}(\infty ,{{t}_{i}})}\text{ (Gl}\text{. 1)}\]](https://concrete.ethz.ch/wp-content/ql-cache/quicklatex.com-b31a1c75376e89610ab8b590e4e24756_l3.png "Rendered by QuickLaTeX.com")
Daher erreicht die horizontale Verschiebung am Pfeilerkopf zur Zeit t = ∞ die maximale horizontale Verschiebung uh,∞ = εcs,∞·LT (Abbildung 4(a)). Wie wir jedoch weiter unten sehen werden, wird das Biegemoment MB,∞ (t=∞) geringer sein als das elastische Biegemoment MB,el,∞ das durch die maximale horizontale Verschiebung uh,∞ verursacht wird (Abbildung 4(b)).
Das Biegemoment MB(t) am Pfeilerkopf kann wie folgt formuliert werden:
![\[{{M}_{B}}(t)=\cancel{{{M}_{B}}({{t}_{0}})}+\Delta {{M}_{B}}(t)=\Delta {{M}_{B}}(t)\text{ (Gl}\text{. 2)}\]](https://concrete.ethz.ch/wp-content/ql-cache/quicklatex.com-ac37255d6a4306dc261197808feae591_l3.png "Rendered by QuickLaTeX.com")
Dabei ist ΔMB(t) die Zunahme des Biegemoments über die Zeit infolge des Schwindens.
Rotationskompatibilitätsbedingung zum Anfangszeitpunkt t=t0:
Die Rotationskompatibilität zum Anfangszeitpunkt (man beachte, dass alle Operationen im Basissystem (BS) angewendet werden) ergibt den Ausdruck:
![\[{{\theta }_{B}}({{t}_{0}})=\cancel{{{\theta }_{B0}}}+{{M}_{B}}({{t}_{0}})\cdot {{\theta }_{B1}}={{\theta }_{BS}}({{t}_{0}})=0\to {{M}_{B}}({{t}_{0}})=\frac{\cancel{{{\theta }_{BS}}({{t}_{0}})}}{{{\theta }_{B1}}}=0\text{ (Gl}\text{. 3)}\]](https://concrete.ethz.ch/wp-content/ql-cache/quicklatex.com-998934174b1ee9185848a5a4ef321d2d_l3.png "Rendered by QuickLaTeX.com")
Wie bereits erwähnt, ist das Biegemoment am Pfeilerkopf zum Anfangszeitpunkt gleich Null MB(t0) = 0, da das Schwinden noch nicht eingesetzt hat.
Zeitabhängige Rotationskompatibilitätsbedingung (Methode von Trost):
Die Entwicklung der zeitabhängigen Rotationskompatibilität erfolgt nach der Methode von Trost. Wenn Sie mit dieser Methode nicht vertraut sind, empfehle ich Ihnen unsere Vorlesung zu Langzeiteinflüssen in Advanced Structural Concrete.
![\begin{align*}& {{\theta }_{B}}(t)=\cancel{{{\theta }_{B0}}}\left[ 1+{{\varphi }_{P}}(t,{{t}_{i}}) \right]+\cancel{{{M}_{B}}({{t}_{0}})}\cdot {{\theta }_{B1}}\left[ 1+{{\varphi }_{P}}(t,{{t}_{i}}) \right]+\Delta {{M}_{B}}(t)\cdot {{\theta }_{B1}}\left[ 1+\mu \cdot {{\varphi }_{P}}(t,{{t}_{i}}) \right]={{\theta }_{BS}}(t)\text{ (Gl. 4)} \\& {{\theta }_{BS}}(t)={{\theta }_{BS,\infty }}\frac{{{\varphi }_{P}}(t,{{t}_{i}})}{{{\varphi }_{P}}(\infty ,{{t}_{i}})} \\& \Delta {{M}_{B}}(t)={{M}_{B}}(t)=\frac{{{\theta }_{BS,\infty }}}{{{\theta }_{B1}}}\cdot \frac{{{\varphi }_{P}}(t,{{t}_{i}})}{{{\varphi }_{P}}(\infty ,{{t}_{i}})}\cdot \frac{1}{1+\mu \cdot {{\varphi }_{P}}(t,{{t}_{i}})} \\& {{M}_{B,el,\infty }}=\frac{{{\theta }_{BS,\infty }}}{{{\theta }_{B1}}}=\frac{6{{E}_{P}}{{I}_{P}}}{{{h}^{2}}}{{\varepsilon }_{cs,\infty }}{{L}_{T}}\text{ (Gl}\text{. 5)} \\& {{M}_{B}}(t)={{M}_{B,el,\infty }}\cdot \frac{{{\varphi }_{P}}(t,{{t}_{i}})}{{{\varphi }_{P}}(\infty ,{{t}_{i}})}\cdot \frac{1}{1+\mu \cdot {{\varphi }_{P}}(t,{{t}_{i}})}\text{ (Gl}\text{. 6)} \\& {{M}_{B,\infty }}(t=\infty )={{M}_{B,el,\infty }}\frac{1}{1+\mu \cdot {{\varphi }_{P}}(\infty ,{{t}_{i}})}\text{ (Gl}\text{. 7)} \\\end{align*}](https://concrete.ethz.ch/wp-content/ql-cache/quicklatex.com-70d44fed1655e011294966bb18605b31_l3.png "Rendered by QuickLaTeX.com")
Beachten Sie, dass die Kompatibilitätsgleichung (Gl. 4) ausdrückt, dass die durch das Biegemoment MB(t) verursachte Rotation θB(t) (überzählige Grösse ÜG) die Rotation aufgrund der Pfeilerkopfverschiebung θBS(t) kompensieren muss; beide Rotationen werden im Basissystem bestimmt. Mit anderen Worten, die Gesamtrotation des Pfeilerkopfes B muss gleich Null sein (siehe Abbildung 3). Der von Trost eingeführte Alterungskoeffizient μ4Der Alterungsbeiwert μ könnte durch Lösen einer linearen und inhomogenen Volterra-Integralgleichung ermittelt werden, aber für typische Fälle kann man μ ≈ 0.8 annehmen. trägt der Tatsache Rechnung, dass der Beton bei später einwirkenden Lasten weniger kriecht. Aus dieser Bedingung lässt sich das Biegemoment MB(t) zu jedem Zeitpunkt t bestimmen (Gl. 6) und in Form des elastischen Biegemoments MB,el,∞ (Gl. 5) ausdrücken.
2. Vorspannung
Im Gegensatz zum Schwinden, bei dem die horizontale Verschiebung am Pfeilerkopf von Null zum Anfangszeitpunkt zunimmt, ist die Vorspannung eine sofortige Einwirkung zum Anfangszeitpunkt (t=t0), die eine anfängliche horizontale Verschiebung uh(t0) = uh,P,el(t0) und ein entsprechendes anfängliches elastisches Biegemoment MB(t0) = MB,el(t0) am Pfeilerkopf verursacht. Danach ändern sich sowohl die horizontale Verschiebung uh(t) als auch das Biegemoment MB(t) über die Zeit.
Ähnlich wie bei der Berechnung der Biegemomente infolge Schwinden wird der Pfeiler isoliert und das Basissystem (BS) mit dem Biegemoment am Pfeilerkopf B MB(t) als überzählige Grösse verwendet, siehe Abbildung 5.
Die gesamte horizontale Verschiebung am Pfeilerkopf uh(t) infolge der Vorspannung beträgt:
![\[{{u}_{h}}(t)={{u}_{h,P,el}}({{t}_{0}})+\Delta {{u}_{h,\varepsilon cc}}(t)+\Delta {{u}_{h,\Delta P}}(t)\text{ (Gl}\text{. 8)}\]](https://concrete.ethz.ch/wp-content/ql-cache/quicklatex.com-fc0f9bc2d7319cc2b662d3969c5ac56b_l3.png "Rendered by QuickLaTeX.com")
wobei,
uh,P,el(t0) die anfängliche horizontale Verschiebung am Pfeilerkopf infolge der elastischen Verformung des Trägers durch die anfängliche Vorspannkraft P(t0) ist, d.h.,
![\[{{u}_{h,P,el}}({{t}_{0}})=\frac{P({{t}_{0}})}{{{k}_{G}}}\text{ (zeitunabh }\!\!\ddot{\mathrm{a}}\!\!\text{ ngige Pfeilerkopfverschiebung) (Gl}\text{. 9)}\]](https://concrete.ethz.ch/wp-content/ql-cache/quicklatex.com-502275b9bb93fcf2d00e73cc0114528a_l3.png "Rendered by QuickLaTeX.com")
Δuh,ecc(t) ist der horizontale Verschiebungszuwachs am Pfeilerkopf über die Zeit aufgrund von Langzeiteffekten, die durch das Kriechen des Trägers φG(t,tj) verursacht werden.
![\[\Delta {{u}_{h,\varepsilon cc}}(t)={{\varphi }_{G}}(t,{{t}_{j}})\cdot {{u}_{h,P,el}}({{t}_{0}}\text{) (zeitabh }\!\!\ddot{\mathrm{a}}\!\!\text{ ngige Pfeilerkopfverschiebung) (Gl}\text{. 10)}\]](https://concrete.ethz.ch/wp-content/ql-cache/quicklatex.com-692f08bac086c1362ff039181917579e_l3.png "Rendered by QuickLaTeX.com")
Δuh,DP(t) ist der horizontale Verschiebungszuwachs am Pfeilerkopf über die Zeit infolge der Änderung der Vorspannkraft ΔP(t) (Vorspannkraftverluste) über die Zeit aufgrund von Schwinden, Kriechen und Relaxation. Sie wird als proportional zur anfänglichen horizontalen Verschiebung uh,P,el(t0) betrachtet und hat einen negativen Wert, da ΔP(t) <0:
![\[\Delta {{u}_{h,\Delta P}}(t)=\frac{\Delta P(t)}{P({{t}_{0}})}\cdot {{u}_{h,P,el}}({{t}_{0}})\text{ (zeitabh }\!\!\ddot{\mathrm{a}}\!\!\text{ ngige Pfeilerkopfverschiebung) (Gl}\text{. 11)}\]](https://concrete.ethz.ch/wp-content/ql-cache/quicklatex.com-77d859c8cf5410cdd99ac19b2caa8078_l3.png "Rendered by QuickLaTeX.com")
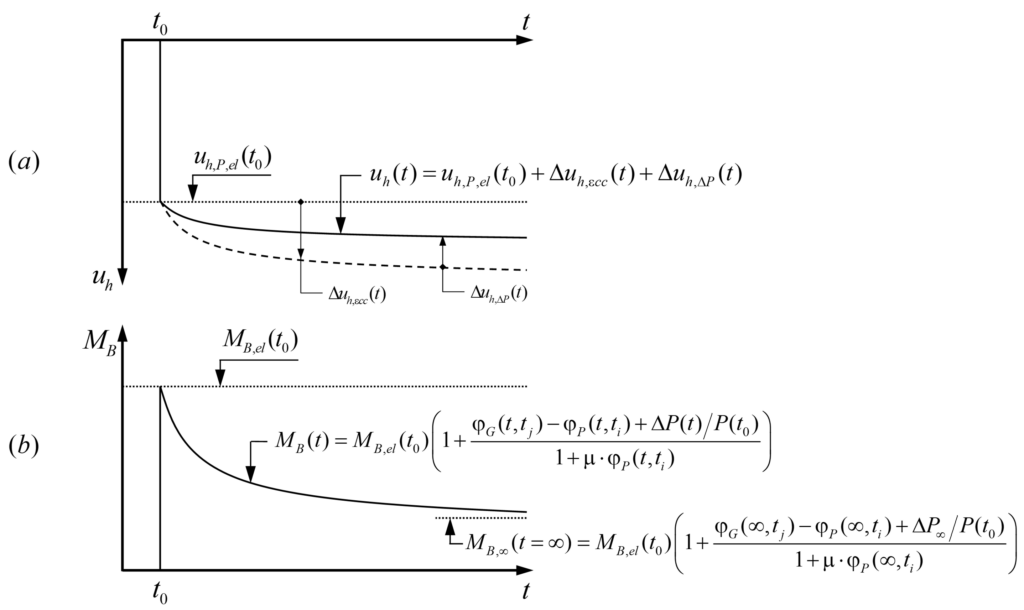
Wenn die Vorspannkraft zum Anfangszeitpunkt (t=t0) aufgebracht wird, weist der Pfeilerkopf eine anfängliche horizontale elastische Verschiebung uh,P,el(t0) auf. Anschliessend nimmt die horizontale Verschiebung aufgrund des Kriechens des Trägers Δuh,εcc(t) mit der Zeit zu, was teilweise durch die Abnahme der Vorspannkraft aufgrund der Vorspannkraftverluste Δuh,ΔP(t) kompensiert wird, siehe Abbildung 6(a). Andererseits wird das Biegemoment MB,el(t0) im Pfeilerkopf, das durch die aufgezwungene horizontale Verschiebung uh,P,el(t0), die elastische Verformung des Trägers infolge der Vorspannung, verursacht wird, im Laufe der Zeit aufgrund des Kriechens und der Vorspannkraftverluste ΔP(t) des Pfeilers verringert (Abbildung 6(b)). Das Biegemoment MB(t) kann wie folgt ausgedrückt werden:
![\[{{M}_{B}}(t)={{M}_{B,el}}({{t}_{0}})+\Delta {{M}_{B}}(t)\text{ (Gl}\text{. 12)}\]](https://concrete.ethz.ch/wp-content/ql-cache/quicklatex.com-8f4d2e6bed97325db840d74dcdba52bd_l3.png "Rendered by QuickLaTeX.com")
Dabei ist ΔMB(t) die Zunahme des Biegemoments über die Zeit aufgrund des Kriechens des Pfeilers und des Trägers sowie der Vorspannkraftverluste.
Für die Berechnung der Biegemomente MB(t) am Pfeilerkopf über die Zeit wird, ähnlich wie bei der Berechnung des Schwindens, erstens die Rotationskompatibilität zum Anfangszeitpunkt und zweitens die zeitabhängige Rotationskompatibilität nach der Methode von Trost angewendet.
Rotationskompatibilitätsbedingung zum Anfangszeitpunkt t=t0:
Die Rotationskompatibilität im Basissystem (BS) zum Anfangszeitpunkt (Abbildung 5) ergibt:

Das anfängliche Biegemoment MB(t0) am Pfeilerkopf ist gleich dem anfänglichen elastischen Biegemoment MB,el(t0), siehe Gl. 14.
Zeitabhängige Rotationskompatibilitätsbedingung (Methode von Trost):
Im Folgenden werden die Gleichungen mit Hilfe der Methode von Trost entwickelt, um den Biegemomentzuwachs am Pfeilerkopf über die Zeit ΔMB(t) zu bestimmen.
![\[{{\theta }_{B}}(t)={{\theta }_{B0}}\left[ 1+{{\varphi }_{P}}(t,{{t}_{i}}) \right]+{{M}_{B}}({{t}_{0}})\cdot {{\theta }_{B1}}\left[ 1+{{\varphi }_{P}}(t,{{t}_{i}}) \right]+\Delta {{M}_{B}}(t)\cdot {{\theta }_{B1}}\left[ 1+\mu \cdot {{\varphi }_{P}}(t,{{t}_{i}}) \right]={{\theta }_{BS,P,el}}({{t}_{0}})+\Delta {{\theta }_{BS,\varepsilon cc}}(t)+\Delta {{\theta }_{BS,\Delta P}}(t)\text{ (Gl}\text{. 15)}\]](https://concrete.ethz.ch/wp-content/ql-cache/quicklatex.com-4580036d5f41fdaea230982b7947420a_l3.png "Rendered by QuickLaTeX.com")
Beachten Sie, dass die Rotation am Auflager B θB(t) über die Zeit, analog zur horizontalen Verschiebung, ergibt:
![\[{{\theta }_{B}}(t)={{\theta }_{B,P,el}}({{t}_{0}})+\Delta {{\theta }_{B,\varepsilon cc}}(t)+\Delta {{\theta }_{B,\Delta P}}(t)\]](https://concrete.ethz.ch/wp-content/ql-cache/quicklatex.com-1ae664796905f139a2ab67077891e71c_l3.png "Rendered by QuickLaTeX.com")
wobei,

Durch Substitution von Gl. 13 und Gl. 14 in Gl. 15:
![\begin{align*} & {{\theta }_{B}}(t)={{M}_{B,el}}({{t}_{0}})\cdot {{\theta }_{B1}}\cdot {{\varphi }_{P}}(t,{{t}_{i}})+\Delta {{M}_{B}}(t)\cdot {{\theta }_{B1}}\left[ 1+\mu \cdot {{\varphi }_{P}}(t,{{t}_{i}}) \right]=\Delta {{\theta }_{BS,\varepsilon cc}}(t)+\Delta {{\theta }_{BS,\Delta P}}(t)\text{ (Gl}\text{. 16)} \\ & \Delta {{M}_{B}}(t)=\left[ \frac{\Delta {{\theta }_{BS,\varepsilon cc}}(t)}{{{\theta }_{B1}}}+\frac{\Delta {{\theta }_{BS,\Delta P}}(t)}{{{\theta }_{B1}}}-{{M}_{B,el}}({{t}_{0}})\cdot {{\varphi }_{P}}(t,{{t}_{i}}) \right]\cdot \frac{1}{1+\mu \cdot {{\varphi }_{P}}(t,{{t}_{i}})}\text{ (Gl}\text{. 17)} \\\end{align*}](https://concrete.ethz.ch/wp-content/ql-cache/quicklatex.com-349d2964b989872ee68f2ae98ce85bfa_l3.png "Rendered by QuickLaTeX.com")
Andererseits kann angenommen werden, dass das Biegemoment und die Rotation am Pfeilerkopf proportional zur horizontalen Verschiebung über die Zeit sind. Daher kann man aus Gl. 10 und Gl. 11 die Biegemomenterhöhungen ΔMB,εcc,el(t) und ΔMB,ΔP,el(t) aufgrund von Kriech- bzw. Vorspannkraftverlusten wie folgt formulieren:

Durch Substitution von Gl. 18 und Gl. 19 in Gl. 17:
![\[\Delta {{M}_{B}}(t)={{M}_{B,el}}({{t}_{0}})\cdot \frac{{{\varphi }_{G}}(t,{{t}_{j}})-{{\varphi }_{P}}(t,{{t}_{i}})+\frac{\Delta P(t)}{P({{t}_{0}})}}{1+\mu \cdot {{\varphi }_{P}}(t,{{t}_{i}})}\text{ (Gl}\text{. 20)}\]](https://concrete.ethz.ch/wp-content/ql-cache/quicklatex.com-cdb79ed3c53318a9454a3d018115edf4_l3.png "Rendered by QuickLaTeX.com")
Durch Einsetzen des Biegemomentinkrements ΔMB(t) aus Gl. 20 in Gl. 12 ergibt sich schliesslich das Gesamtbiegemoment am Pfeilerkopf über die Zeit MB(t) wie folgt:

3. Zusammenfassung und Diskussion
Schwinden:
Das Biegemoment MB,∞ am Pfeilerkopf zur Zeit t = ∞ infolge des Schwindens ist wie folgt:
![\[{{M}_{B,\infty }}={{M}_{B,el,\infty }}\frac{1}{1+\mu \cdot {{\varphi }_{P}}(\infty ,{{t}_{i}})}\]](https://concrete.ethz.ch/wp-content/ql-cache/quicklatex.com-a37758496dd3dc3ef9adfe7890ce3986_l3.png "Rendered by QuickLaTeX.com")
Dabei ist μ ≈ 0.80 und ti das Alter des Pfeilerbetons, wenn der Träger zu schwinden beginnt. Abbildung 7 zeigt das Verhältnis zwischen dem Biegemoment MB,∞ und dem elastischen Biegemoment MB,el,∞ am Pfeilerkopf zur Zeit t = ∞ als Funktion des Pfeiler-Kriechkoeffizienten φP(∞,ti).
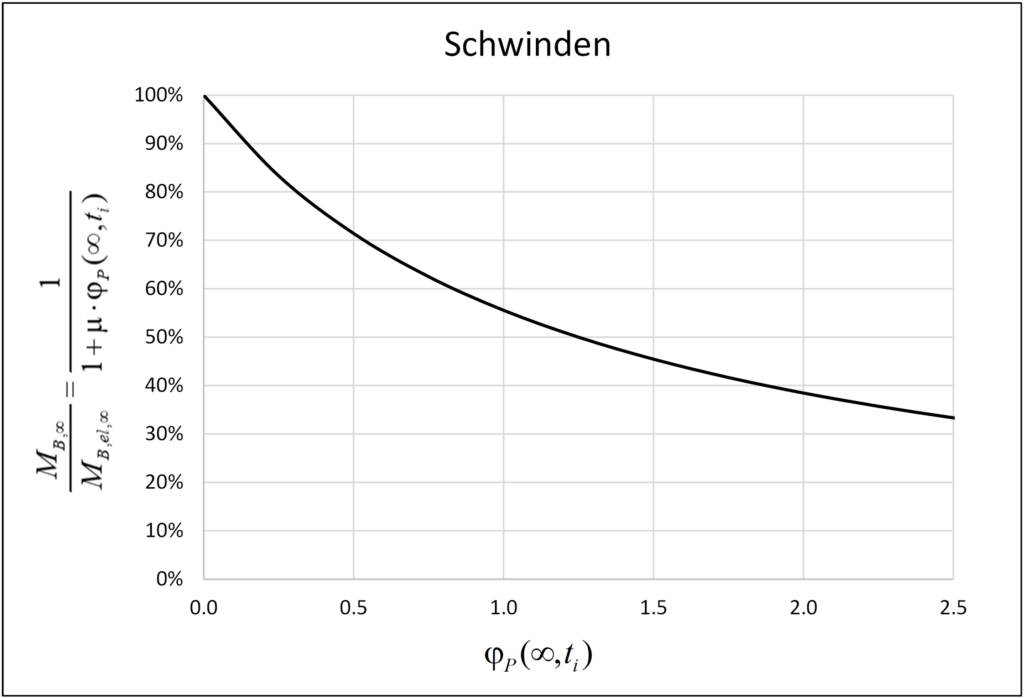
Das Biegemoment MB(t) am Pfeilerkopf infolge Schwinden wächst mit der Zeit an, bis es zur Zeit t = ∞ ein maximales Biegemoment MB,∞ erreicht (siehe Abbildung 4(b)), das das 1/(1+μ·φP(∞,ti)) fache des elastischen Biegemoments MB,el,∞ infolge der kurzfristigen Wirkung des Gesamtschwindens εcs,∞ beträgt.
Das maximale Biegemoment MB,∞ am Pfeilerkopf zur Zeit t = ∞, das unabhängig vom Kriechkoeffizienten φG(∞,ti) des Trägers ist, ist gleich 38%·MB,el,∞ für einen typischen Wert von φP(∞,ti) = 2.0. Aus diesem Grund berücksichtigen viele Ingenieure 40% des Gesamtschwindens (40%·φcs,∞), um die Schnittgrössen in den Pfeilern zur Zeit t = ∞ aufgrund von Langzeiteinflüssen zu bestimmen. Da die Pfeiler jedoch vor dem Träger gebaut werden, ist der Pfeilerkriechkoeffizient im Betonalter, in dem der Träger zu schwinden beginnt, oft kleiner als 2.0 und in Regionen mit hoher relativer Luftfeuchtigkeit ohnehin kleiner (z. B. φP(∞,t0) ≈ 1.8 für C30/37 und RH ≈ 80%, wie in der Schweiz üblich). Wird darüber hinaus die vorteilhafte Wirkung eines gerissenen Pfeilers mit entsprechend reduzierter Steifigkeit berücksichtigt, muss ein noch geringerer äquivalenter Kriechkoeffizient φP (ermittelt z.B. aus einer Querschnittsanalyse als Verhältnis der Krümmungen mit und ohne Kriechen) verwendet werden. Wenn die Ingenieure nicht über diesen Hintergrund verfügen und wahllos den Referenzwert von 40% (φP(∞,ti) = 2.0) oder sogar einen reduzierten Wert für das Schwinden aufgrund der hohen Luftfeuchtigkeit verwenden, kann der Entwurf der Pfeiler auf der unsicheren Seite liegen, insbesondere bei GZG. Betrachtet man beispielsweise einen Pfeiler-Kriechkoeffizienten zur Zeit t = ∞ von φP(∞,ti) = 1.25 ab dem Zeitpunkt, an dem der Träger zu schwinden beginnt, so beträgt das Biegemoment am Pfeilerkopf MB,∞ = 50%·MB,el,∞, d.h. 32% höher als MB,∞ = 38%·MB,el,∞ für φP(∞,ti) = 2.0.
Vorspannung:
Das Biegemoment MB,∞ am Pfeilerkopf zur Zeit t = ∞ infolge der Vorspannung (einschliesslich kurz- und langfristigen Einflüssen) beträgt:
![\[{{M}_{B,\infty }}={{M}_{B,el}}({{t}_{0}})\cdot \left( 1+\frac{{{\varphi }_{G}}(\infty ,{{t}_{j}})-{{\varphi }_{P}}(\infty ,{{t}_{i}})+\frac{\Delta {{P}_{\infty }}}{P({{t}_{0}})}}{1+\mu \cdot {{\varphi }_{P}}(\infty ,{{t}_{i}})} \right)\]](https://concrete.ethz.ch/wp-content/ql-cache/quicklatex.com-17534854d9d020a94b6d2381226cbdb9_l3.png "Rendered by QuickLaTeX.com")
wobei tj und ti das Betonalter des Trägers bzw. des Pfeilers bei Einwirkung der Vorspannung sind.
Abbildung 8 zeigt das Verhältnis zwischen dem Biegemomentzuwachs ΔMB,∞ und dem anfänglichen elastischen Biegemoment MB,el(t0) am Pfeilerkopf zur Zeit t = ∞. Wie bei der Bemessung häufig angenommen, wirkt das Kriechen des Pfeilers zusammen mit dem (negativen) Beitrag der Vorspannungsverluste dem Anstieg der Biegemomente am Pfeilerkopf, der durch das Kriechen des Trägers verursacht wird, entgegen und kompensiert ihn bei bestimmten Werten der Kriechkoeffizienten sogar. In typischen Fällen sind jedoch erhebliche Unterschiede zu beobachten. Im Allgemeinen ist das Verhältnis ΔMB,∞ / MB,el(t0) eine Funktion des Pfeiler-Kriechbeiwerts φP(∞,ti), des Träger-Kriechbeiwerts φG(∞,tj), der Vorspannkraftverluste ΔP∞/P(t0) und des Alterungsbeiwerts μ. Die in Abbildung 8 dargestellten Kurven wurden für μ=0.80, φG(∞,tj) = {1.0; 1.5; 2.0} und ΔP∞/P(t0)= {0%; 10%} erstellt. Man kann feststellen, dass die Vorspannkraftverluste eine geringe Auswirkung auf das Verhältnis ΔMB,∞ / MB,el(t0) haben (etwa 5 % für die verwendeten Parameter), was in den Berechnungen vernachlässigt werden kann.
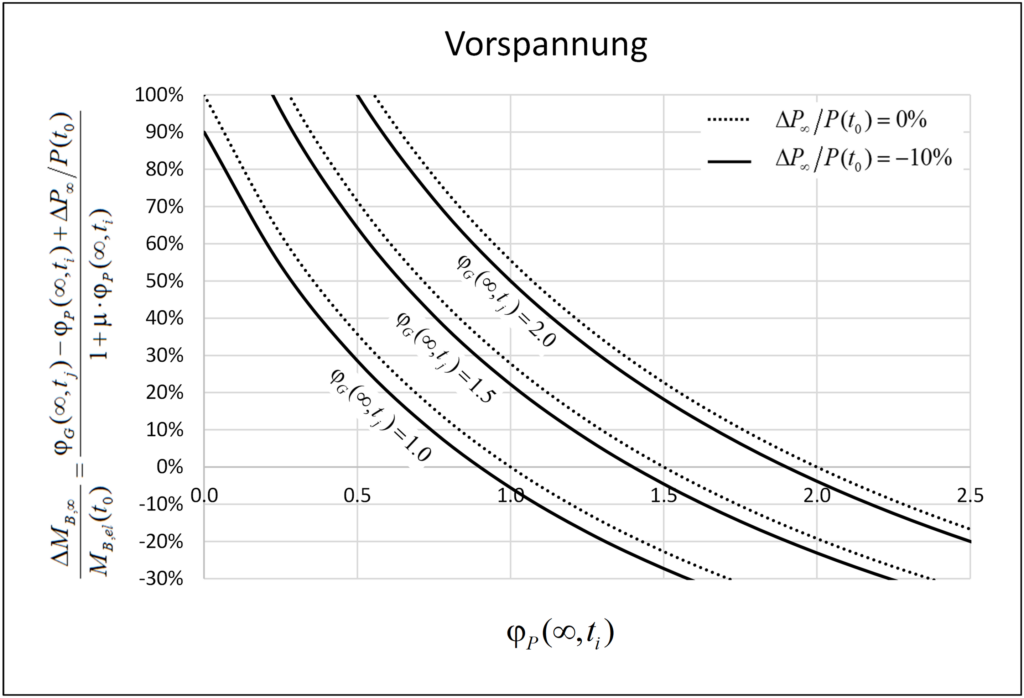
Das Verhältnis ΔMB,∞ / MB,el(t0) hängt von den Kriechkoeffizienten des Trägers und des Pfeilers (mit ti und tj = Betonalter dieser Elemente zum Zeitpunkt des Aufbringens der Vorspannung) sowie von den Vorspannungsverlusten ab. Das anfängliche Biegemoment MB,el(t0) am Pfeilerkopf nimmt im Laufe der Zeit ab, wenn der Kriechkoeffizient des Pfeilers φP(∞,ti) höher ist als der Kriechkoeffizient des Trägers φG(∞,tj), d. h. φP(∞,ti) > φG(∞,tj), und nimmt andernfalls zu (unter Vernachlässigung der Vorspannungsverluste), was typischerweise zutrifft, da die Pfeiler vor den Trägern gebaut werden.
Bei einem Pfeiler-Kriechkoeffizienten von φP(∞,ti) = 1.25 erhöht sich das Biegemomentinkrement ΔMB,∞ zur Zeit t = ∞ um etwa 10 % bzw. 35 % gegenüber dem anfänglichen Biegemoment MB,el(t0) für Träger-Kriechkoeffizienten von φG(∞,tj) = 1.5 bzw. φG(∞,tj) = 2.0. Ein Anstieg von 35 % ist nicht von vornherein vernachlässigbar; er kann jedoch für niedrige und mittlere Vorspannungsniveaus des Trägers vernachlässigt werden, da der Biegemomentenzuwachs ΔMB,∞ im Vergleich zu dem durch Schwinden verursachten Biegemoment in der Regel gering ist.
4. Schlussfolgerungen
Für eine vorläufige Bemessung (Abschätzung der inneren Einwirkung) von Pfeilern, die monolithisch mit einem vorgespannten Träger verbunden sind, ist es eine gültige Näherung, 40…50 % des Gesamtschwindens zur Zeit t = ∞ εcs,∞ zu berücksichtigen und die über die Zeit zunehmende innere Kraft infolge der Vorspannung zu vernachlässigen. Diese Überlegungen können auch bei der Detailplanung akzeptabel sein, wenn die Bemessung der Pfeiler nicht entscheidend ist und der Planer den Einfluss der Langzeiteinflüsse auf das Bauwerk, einschliesslich des Bauprozesses, kontrollieren kann. Im Allgemeinen kann jedoch die Verwendung eines Wertes von 40%·εcs,∞ zur Berücksichtigung der langfristigen Auswirkungen unsicher sein, da die in den Pfeilern wirkenden Schnittgrössen unterschätzt werden.
Die vorgestellten Gleichungen zur Abschätzung der Schnittgrössen in den Pfeilern aufgrund der Langzeiteinflüsse sind in der Ingenieurpraxis nützlich. Sie ermöglichen eine einfache, aber wesentlich genauere Langzeitanalyse, wie sie für lange fugenlose Bauwerke mit monolithischen Pfeiler-Träger-Verbindungen erforderlich ist. Darüber hinaus kann eine geeignete Strategie der Betonierabschnitte dazu beitragen, die Länge von fugenlosen Bauwerken deutlich zu erhöhen.
Abschliessend wird darauf hingewiesen, dass die durch Schwinden und Vorspannung verursachten Momente an den Pfeilerköpfen aufgrund des Kriechens der Pfeiler zwar reduziert werden, dass aber bei der Bemessung von Lagern und Dehnungsfugen und der Abschätzung von Brückenendverschiebungen in integralen Widerlagern die vollen Trägerverschiebungen berücksichtigt werden müssen.
Ich hoffe, dass dieser Beitrag für Sie von Interesse und Nutzen war. Wir freuen uns über Kommentare und Anregungen.
Alejandro Giraldo Soto
Kommentieren Sie diesen Beitrag auf LinkedIn oder Instagram